

 网站直销
网站直销














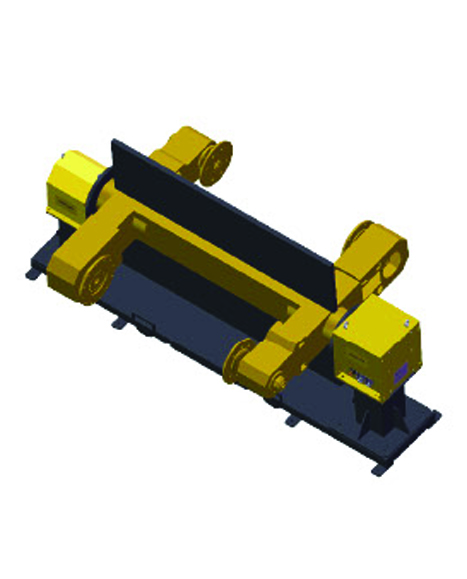















 VA1400Ⅱ
VA1400Ⅱ
 7轴化更灵活,机器人始终保持较佳焊接姿势,大大地提高了焊接品质。
7轴化更灵活,机器人始终保持较佳焊接姿势,大大地提高了焊接品质。
 机械臂与底部可内置电缆,达到高密度配置,轻松避免工件与夹具间的干涉。
机械臂与底部可内置电缆,达到高密度配置,轻松避免工件与夹具间的干涉。
 追加减速机寿命诊断,硬件保护等新功能。
追加减速机寿命诊断,硬件保护等新功能。
 安全选项功能进一步强化,实现功能安全模块的焊接位置监视。
安全选项功能进一步强化,实现功能安全模块的焊接位置监视。
| VA1400Ⅱ技术参数 | ||
| 适用控制柜 | DX200 | |
| 设置 | F.W.C | |
| 自由度 | 7 | |
| 可搬质量(kg) | 3 | |
| 垂直伸长度(mm) | 2475 | |
| 水平伸长度(mm) | 1434 | |
| 重复定位精度*2(mm) | +0.08 | |
| 动作范围(°) | S轴(旋转) | -170 ~ +170 |
| L轴(下臂) | -70 ~ +148 | |
| E轴(肘) | -90 ~ +90 | |
| U轴(上臂) | -175 ~ +150 | |
| R轴(手腕旋转) | -150 ~ +150 | |
| B轴(手腕摆动) | -45 ~ +180 | |
| T轴(手腕回转) | -200 ~ +200 | |
| 最大速度(°/s ) | S轴(旋转) | 200 |
| L轴(下臂) | 200 | |
| E轴(肘) | 220 | |
| U轴(上臂) | 220 | |
| R轴(手腕旋转) | 410 | |
| B轴(手腕摆动) | 410 | |
| T轴(手腕回转) | 610 | |
| 容许力矩(N.m) | R轴(手腕旋转) | 8.8 |
| B轴(手腕摆动) | 8.8 | |
| T轴(手腕回转) | 2.9 | |
| 容许惯性力矩(GD2/4)(kg.m²) | R轴(手腕旋转) | 0.27 |
| B轴(手腕摆动) | 0.27 | |
| T轴(手腕回转) | 0.03 | |
| 本体质量(kg) | 150 | |
| 电源容量*3(KVA) | 1.5 | |
*1:F=置地式,W=挂壁式,C=倒挂式,S=支架式(挂壁式时,S轴的动作会有限制,请注意。)
*2:JIS B 8432为基准。
*3:因用途,动作模式而异。
*4:高精度用途时推荐负载在30KG以下。
注:以上参数因机型不断改进有可能改动
 VA1400Ⅱ
VA1400Ⅱ 点击下载
点击下载
 网站直销
网站直销








