

 网站直销
网站直销














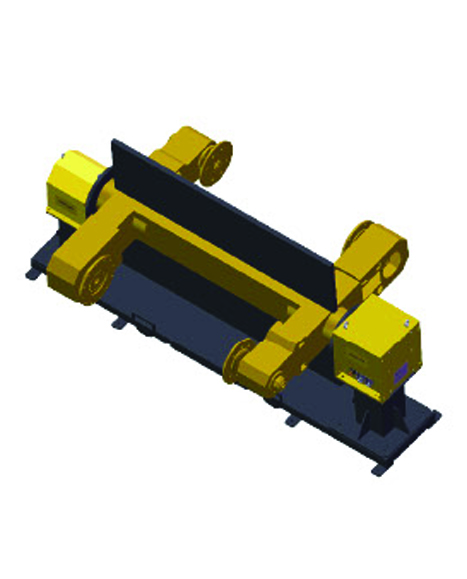















 埃斯顿ER通用六关节机器人
埃斯顿ER通用六关节机器人
 用途:弧焊
用途:弧焊
 运动轨迹控制方式:连续轨迹控制
运动轨迹控制方式:连续轨迹控制
 驱动方式:机械式
驱动方式:机械式
 自由度数:6
自由度数:6
 负载能力:16kg
负载能力:16kg
| 埃斯顿ER通用六关节机器人技术参数 | ||||
| 型号 | ER4-1450 | ER6-1600 | ER10-1600 | |
| 最大负载(kg) | 4 | 6 | 10 | |
| 臂展(mm) | 1450 | 1600 | 1600 | |
| 重复定位精度(mm) | ±0.1 | ±0.08 | ±0.1 | |
| 防护等级 | IP65 | IP65 | IP65 | |
| 工作范围 | 轴1 | ±180° | ±180° | ±180° |
| 轴2 | -70°~+160° | -60°~+140° | -60°~+140° | |
| 轴3 | -200°~+80° | -155°~+80° | -170°~+80° | |
| 轴4 | ±170° | ±170° | ±360° | |
| 轴5 | ±135° | ±180° | -130°~+120° | |
| 轴6 | ±360° | ±360° | ±360° | |
| 最大速度 | 轴1 | 156°/s | 148°/s | 148°/s |
| 轴2 | 156°/s | 109°/s | 109°/s | |
| 轴3 | 234°/s | 214°/s | 214°/s | |
| 轴4 | 360°/s | 440°/s | 368°/s | |
| 轴5 | 520°/s | 435°/s | 385°/s | |
| 轴6 | 540°/s | 520°/s | 462°/s | |
| 重量(kg) | 145 | 164 | 170 | |
| 机器人运行功率(KW) | 2 | 22 | 26 | |
| 安装方式 | 地面/倒装 | 地面/倒装 | 地面/倒装 | |
注:以上参数因机型不断改进有可能改动
| 埃斯顿ER通用六关节机器人技术参数 | ||||
| 型号 | ER100-3200 | ER170-2605 | ER220-2605 | |
| 最大负载(kg) | 100 | 170 | 220 | |
| 臂展(mm) | 3125 | 2600 | 2600 | |
| 重复定位精度(mm) | ±0.2 | ±0.2 | ±0.2 | |
| 防护等级 | IP65 | IP65 | IP65 | |
| 工作范围 | 轴1 | ±180° | ±180° | ±180° |
| 轴2 | -55°~+80° | -53°~+78° | -53°~+78° | |
| 轴3 | -195°~+80° | -193°~+78° | -193°~+78° | |
| 轴4 | ±170° | ±360° | ±360° | |
| 轴5 | ±120° | ±123° | -130°~+120° | |
| 轴6 | ±360° | ±360° | ±118° | |
| 最大速度 | 轴1 | 85°/s | 114°/s | 114°/s |
| 轴2 | 80°/s | 105°/s | 105°/s | |
| 轴3 | 89°/s | 119°/s | 109°/s | |
| 轴4 | 120°/s | 190°/s | 190°/s | |
| 轴5 | 120°/s | 183°/s | 125°/s | |
| 轴6 | 200°/s | 255°/s | 273°/s | |
| 重量(kg) | 1500 | 1375 | 1400 | |
| 机器人运行功率(KW) | 7 | 9 | 9 | |
| 安装方式 | 地面/支架 | 地面/支架 | 地面/支架 | |
注:以上参数因机型不断改进有可能改动

 网站直销
网站直销








